无人自动驾驶技术之使用OpenCV进行相机校准
照相机与摄像头,是机器人,人工智能,计算机视觉,工业自动化甚至娱乐行业等多个领域的组成部分。在我们使用此设备时,不仅要了解照相原理外,需要使用特殊的技术对摄像头进行相机校准,特别在自动化驾驶上,需要实时的对照相机进行校准操作
继续阅读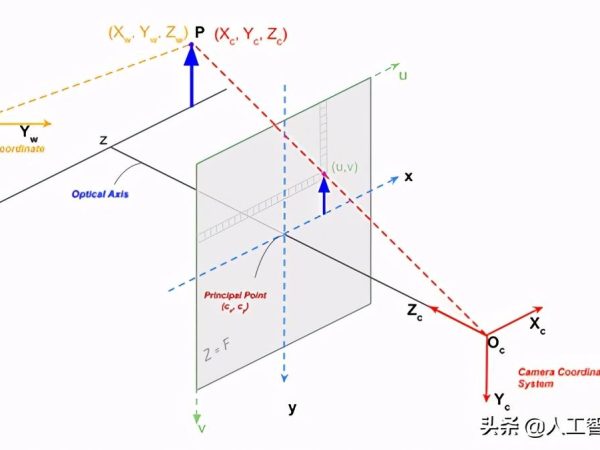
照相机与摄像头,是机器人,人工智能,计算机视觉,工业自动化甚至娱乐行业等多个领域的组成部分。在我们使用此设备时,不仅要了解照相原理外,需要使用特殊的技术对摄像头进行相机校准,特别在自动化驾驶上,需要实时的对照相机进行校准操作
继续阅读
什么是视频与图片的超分辨率,总结一下便是给一张分辨率比较低的图片,进行超分辨率的处理后,生成比较清晰的高分辨率的图片,上图图片完美解释了超分辨率的过程,由于不同的算法不同,处理的结果也不相同,本期我们介绍一下如何进行图片的超分辨率的处理。
继续阅读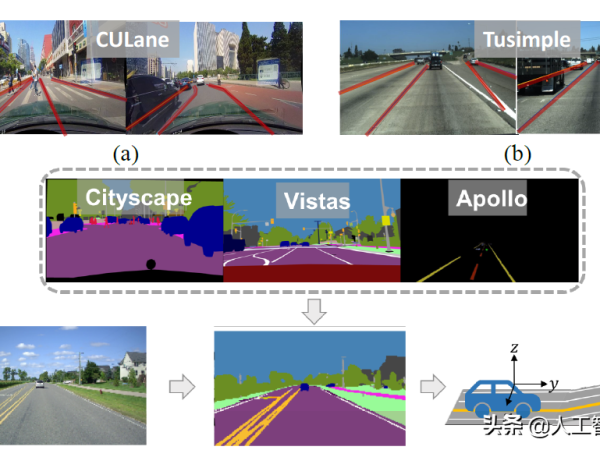
准确可靠的车道检测是车道保持(LK)、变道自动化(LCA)和车道偏离警告(LDW)功能的关键特性。车道检测的研究可以追溯到20世纪80年代。世纪之交后,LDW和LK已经商业化,有些车辆甚至有LCA。DARPA和早期ADAS产品发起的自动驾驶挑战进一步推动了车道检测系统的发展。
继续阅读
我们都知道正方形(长方形)的中心是2条对角线的交点,圆的中心是一个圆的圆心,如何在对象检测以及图片检测与识别领域,判断一个形状的中心,便是计算机视觉领域中的一个基础检测
继续阅读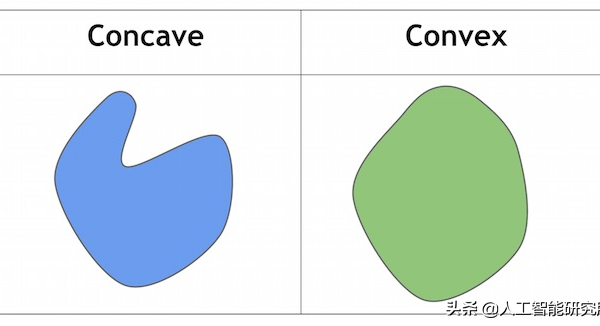
blob是图像中一组共享的区域,它们具有一些共同的属性(例如灰度值,形状,尺寸等)blob检测的目的是识别并标记一些特定区域,blob检测在自动化工业领域比较常见。OpenCV提供了一种方便的方法来检测blob并根据不同的特征对其进行过滤。那就是SimpleBlobDetector检测算法
继续阅读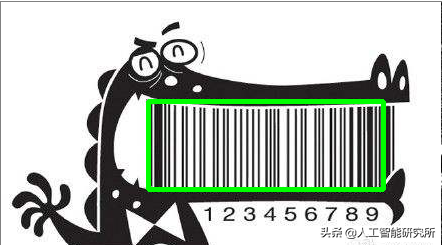
如何使用opencv来进行条形码的检测,毕竟超市里面的物品都是有价格条形码,如何进行opencv条形码的检测,便成了无人超市需要重点关注并需要解决的问题
继续阅读
背景分割技术,讲的明白一些就是收集背景图片,此图片作为参考图片,当有移动物体进入背景后,实时对当前视频帧图片与背景帧图片进行对比,进而检测出运动物体的存在,并实时进行追踪
继续阅读
上期文章,我们介绍了YOLOV4对象检测算法的模型以及基本知识,哪里还进行了图片的对象检测,如何使用YOLOV4进行视频检测与实时视频检测呢?毕竟我们绝大多数的需求必然是视频的实时对象检测
继续阅读
YOLO系列对象检测算法,算是人工智能技术领域的一匹黑马,当开发者宣布不再为YOLO系列检测算法更新时,很多开发者瞬间失去了”精神食粮“。突然,当YOLOV4检测算法发布的时候,让很多开发者喜出望外。
继续阅读
在计算机的世界里,只有 0 或者1,如何让计算机认识颜色是计算机视觉工作者首先需要考虑的事情,我们知道整个世界的颜色虽然五彩缤纷,但是都是3种原色彩合成的(R G B),有了(R G B)三源色,便可以通过调节不同的颜色比例来达到其他颜色的效果。
继续阅读